David A. Snyder
Generalization and Safety in Robotics at University of Pennsylvania.

Department of Electrical and Systems Engineering.
Philadelphia, PA 19104
I am a postdoctoral research fellow in the Department of Electrical and Systems Engineering at the University of Pennsylvania, working with George Pappas and Nikolai Matni at the intersection of control, robust decision-making, machine learning, and robotics. Previously, I completed my PhD in the Intelligent Robot Motion Laboratory at Princeton University, advised by Ani Majumdar.
My research develops theory for robotic systems which holds nonasymptotically (i.e., in finite samples) under realistic models of uncertainty in the operating environment. These guarantees are designed to codify, complement, and inform empirical developments within the field. In general, these guarantees can be partitioned according to the modeling assumptions over the uncertainty, spanning the worst-case (adversarial, or ‘nonstochastic’) settings to i.i.d. stochastic realizations of uncertainty. The former occur within-trajectory, where the signals may have strong temporal correlation, whereas the latter tend to arise in batch contexts. One of the most compelling areas of research at present is understanding the scope of the ‘in-between:’ when the data is correlated but admits structure so as to not require fully adversarial treatment.
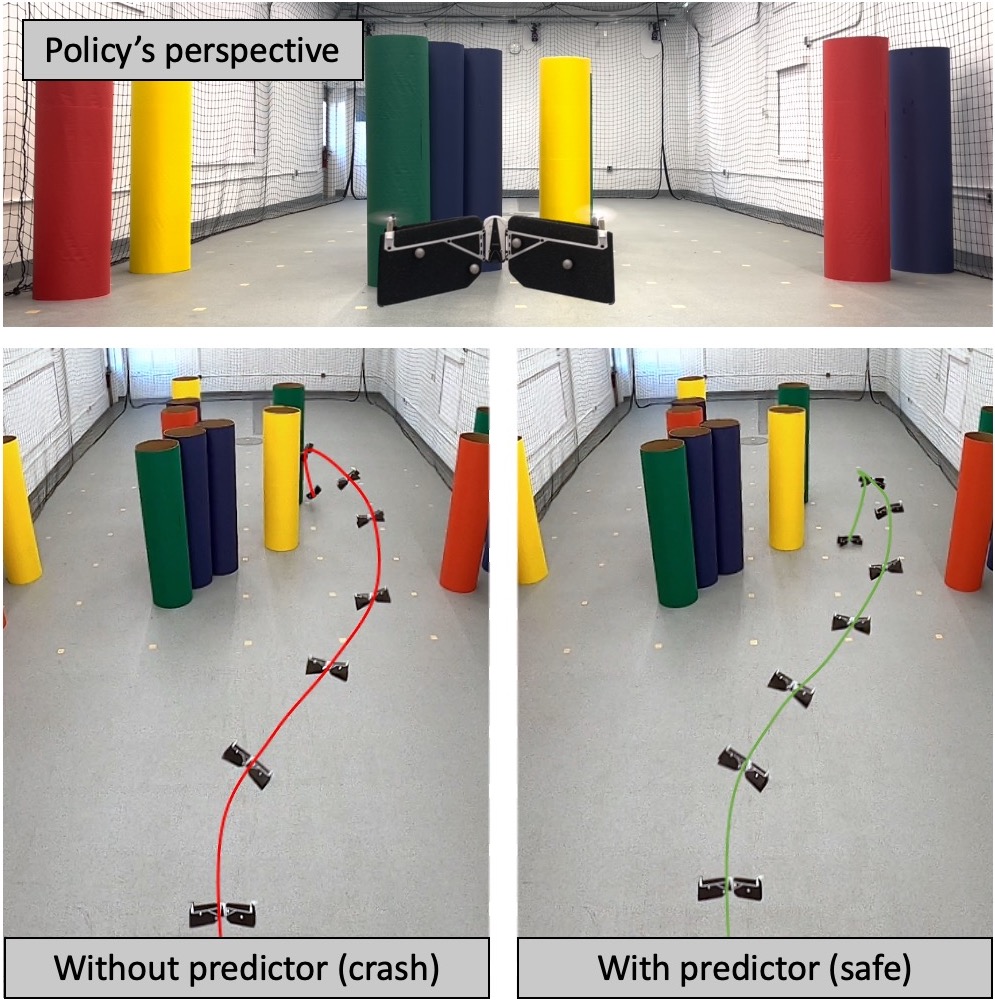
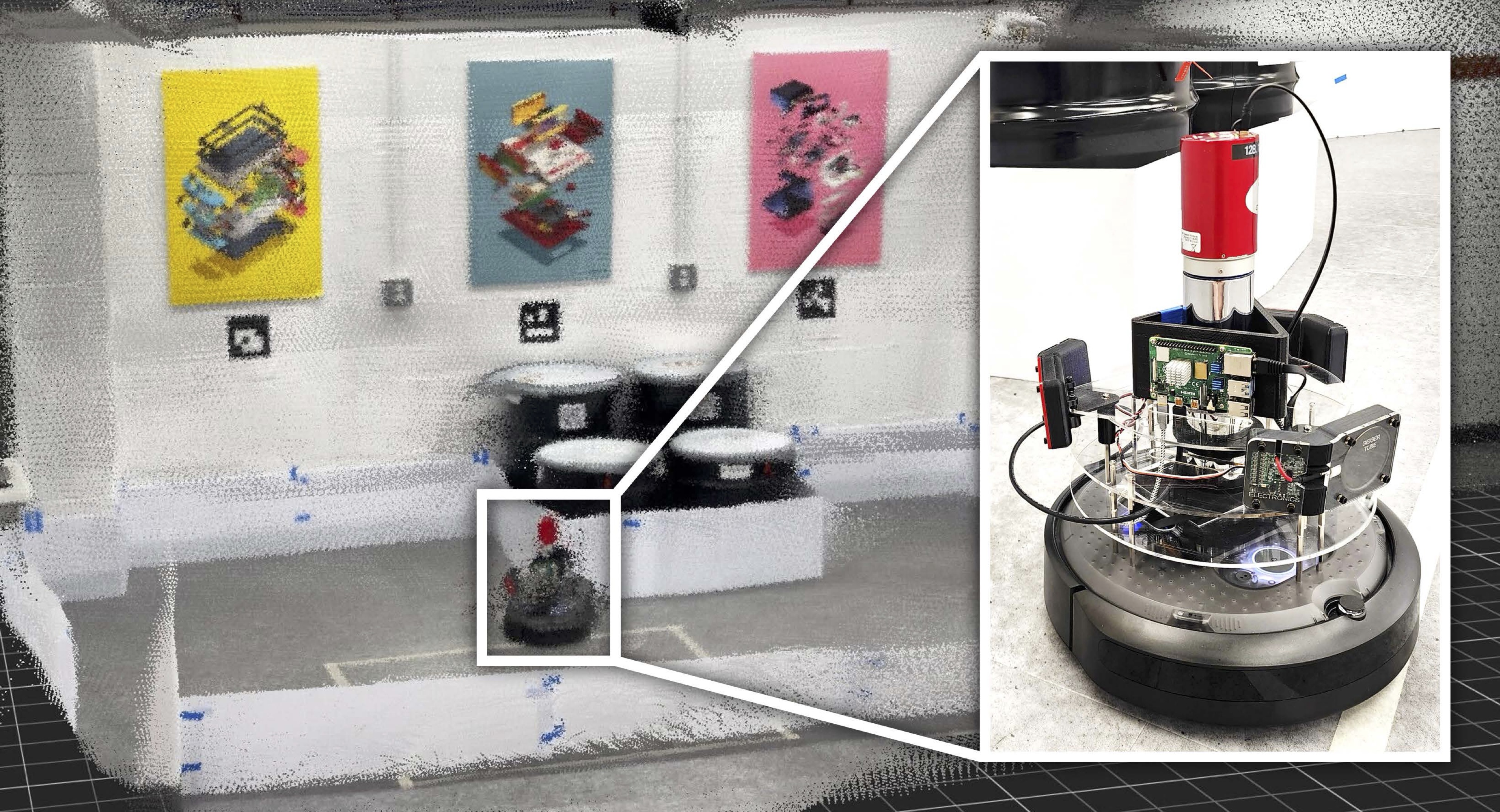
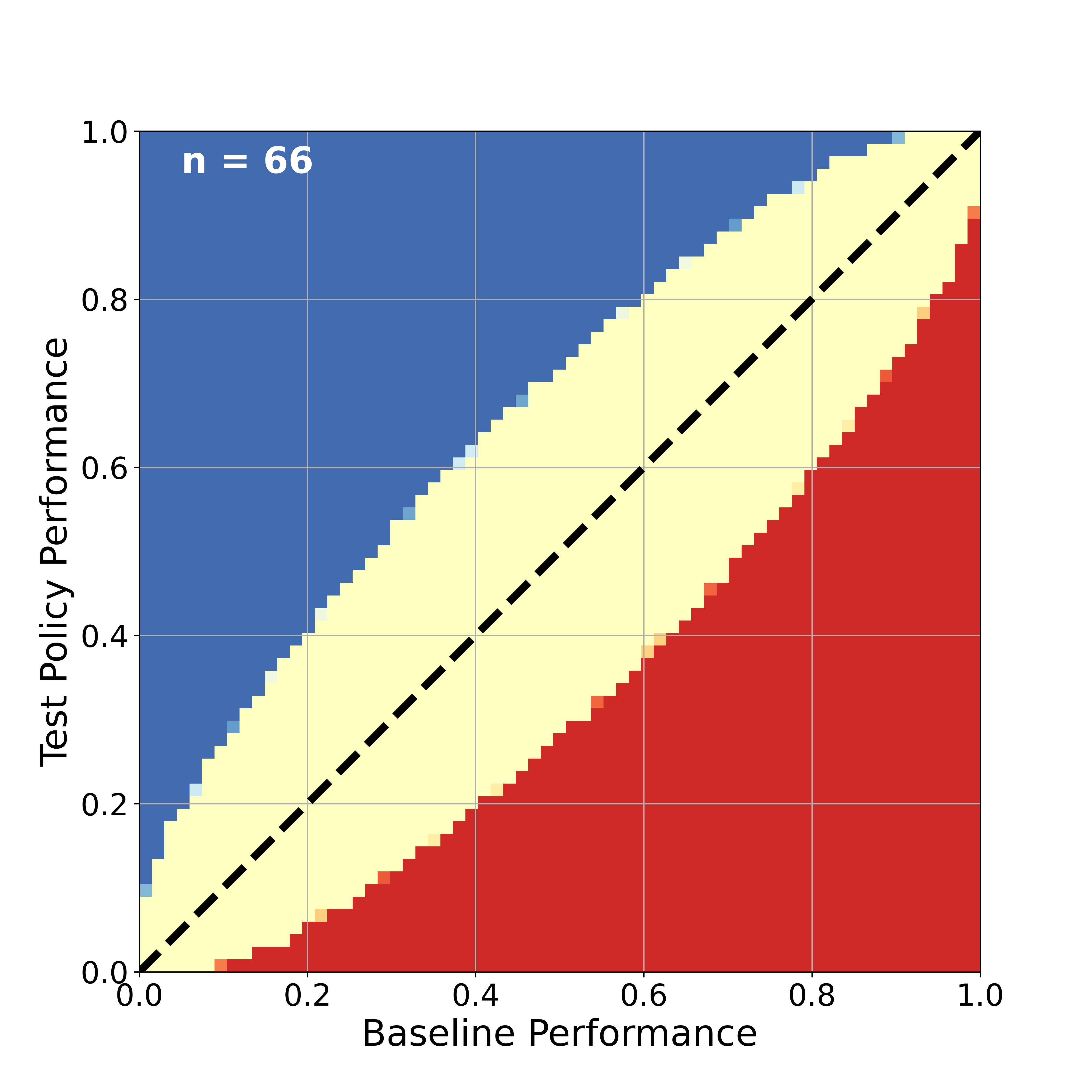
During my PhD I developed methods tailored to each of these domains. In the adversarial context, I developed an algorithm for learned controller validation in the setting of linear systems (MOTR) using techniques from regret minimization in online learning; this was later lifted to the higher-level problem of obstacle avoidance (OLC). The latter was one of the first examples of practical implementation of online regret-minimizing controllers on hardware. In the stochastic context, we developed methods for online failure prediction and mitigation via extending PAC-Bayes generalization bounds FP. More recently, we have applied techniques from sequential analysis and safe, anytime-valid inference (SAVI) for multivalent problems of evaluation within the robotics context. This has led to fruitful developments within the context of policy comparison and active data collection, as illustrated by STEP.
Prior to my PhD, I received my bachelor’s degree from the University of Maryland, College Park (go Terps!). Outside of work I enjoy cycling, chess, classical music, and playing tennis.
Feel free to contact me at: dsnyder5 at seas dot upenn dot edu.
news
No news so far...
Publications
-
 Generating Adversarial Disturbances for Controller VerificationIn Proceedings of the 3rd Conference on Learning for Dynamics and Control (L4DC 2021) May 2021
Generating Adversarial Disturbances for Controller VerificationIn Proceedings of the 3rd Conference on Learning for Dynamics and Control (L4DC 2021) May 2021


Patents
PhD Thesis
Talks
(Upcoming) Efficient and General Evaluation Methods for Robotic Systems- March 20th, 2026: RGSO-CARS Seminar, University of Delaware
- March 31rst, 2025: USC CPS Seminar, University of Southern California
- March 7th, 2025: Pappas Group, University of Pennsylvania
- June 2nd, 2023: ICRA 2023 Workshop on Bridging the Lab-to-Real Gap
- June 22, 2022: Google Office Princeton